MIT designs robotic cheetah that can jump and run like a regular cheetah.
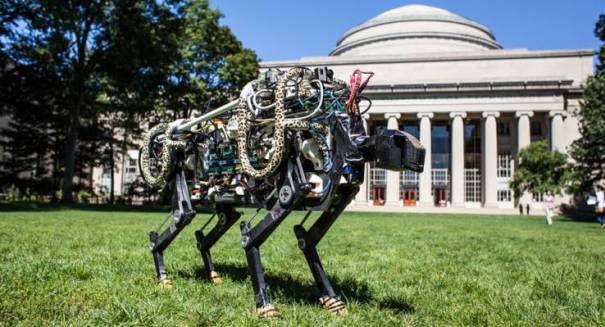
In another major leap (literally) for the robotics field, MIT researchers have recently unveiled a robotic cheetah that is able to jump and run like a regular cheetah thanks to force control on its robotic legs.
While many robots have previously exhibited clunky and awkward movements, MIT’s team developed an algorithm that allows their robot to move in a more natural way. This is due to a program that controls how much force is exerted through each leg. The team extensively studied how animals move naturally in the field and designed their algorithm to mimic these movements.
The robotic cheetah is over two feet long and weighs just under 70 lbs. It can move at roughly 30 mph and jump about a foot in the air. The use of different force equations allow the cheetah to handle obstacles in its path and run well on rougher terrain.
While most robots are powered by internal combustion engines equipped with hydraulic transmissions, MIT’s robot uses electric motors that allow the cheetah to be “wireless.” It’s the fastest and most agile robot using electric motors to date. Associate professor of mechanical engineering Sangbae Kim hopes it will change the outlook on electric motors from underpowered to fully capable.
It is hoped that this project will revolutionize the robotics world by providing robots capable of more natural and fluid movements. MITs team has spoken about a variety of uses for this technology, such as self-driving cars and even prosthetic limbs.
The project was designed by a team of experts including Meng Yee Chuah, Hae-won Park, and Sangbae Kim, all from MIT. They are due to present their findings at IROS in Chicago on Tuesday. The robot’s motors were created by David Otten, a research engineer at the school’s Research Laboratory of Electronics, and Jeffrey Lang, the Vitesse Professor of Electrical Engineering.
Good to reply